0
Lista vacía
No has añadido ningún curso

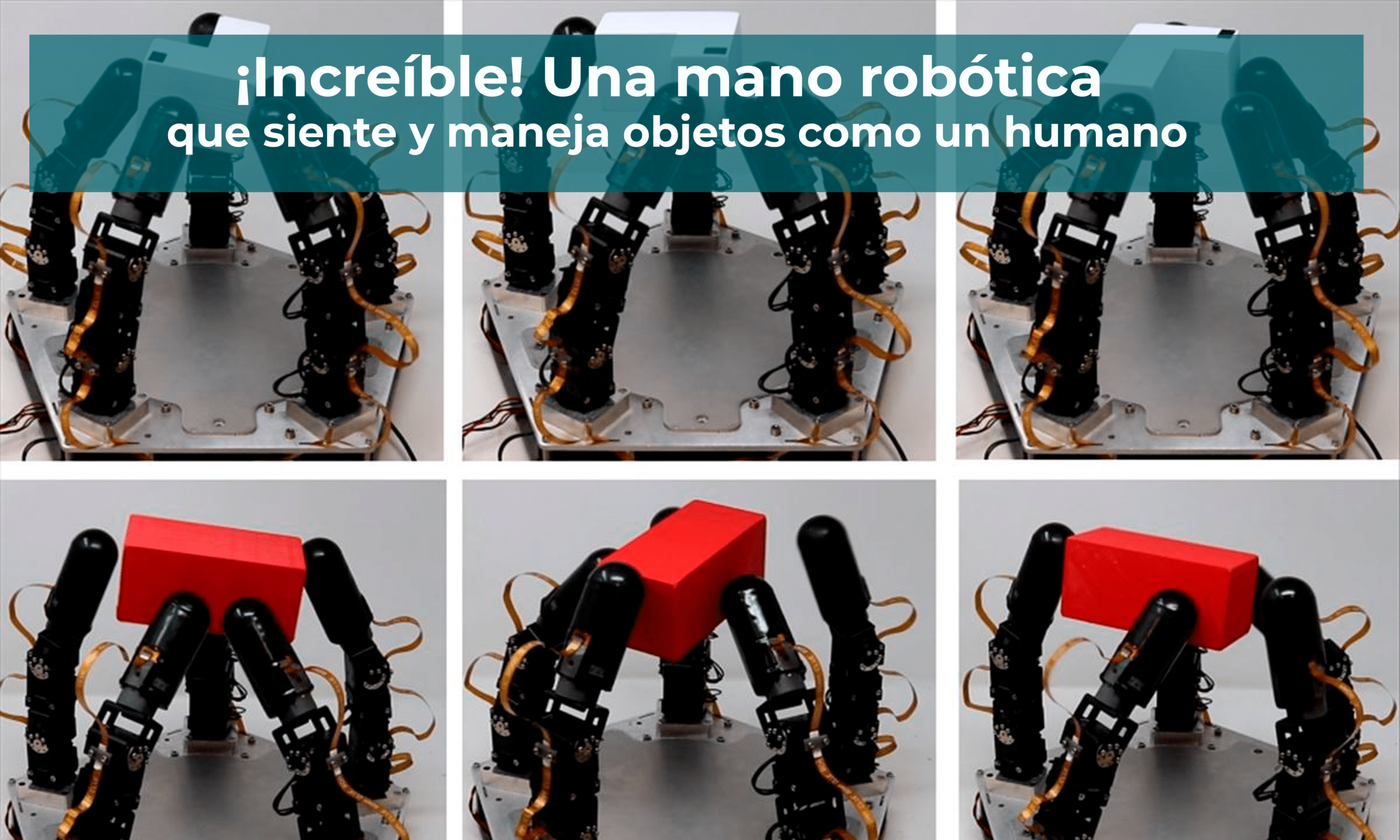
La creación de una mano robótica capaz de sentir y manipular objetos con destreza humana ha dado un gran salto hacia el futuro. Un grupo de investigadores de la prestigiosa Universidad de Columbia ha logrado un hito impresionante al desarrollar un dispositivo robótico que imita las habilidades y sensaciones táctiles de una mano humana. Este avance representa un paso significativo en el campo de la robótica. Acercando aún más la frontera entre las capacidades de los robots y las habilidades de los seres humanos.
Además, no pierdas esta oportunidad de impulsar tu carrera y mantenerte a la vanguardia de las últimas tendencias digitales y tecnológicas. ¡Inscríbete en nuestros cursos gratuitos de competencias digitales y tecnologías disruptivas hoy mismo y desata todo tu potencial en el mundo digital!
 La creación de esta mano robótica capaz de sentir y manejar objetos como si fuera un ser humano. Representa un avance interesante en el campo de la robótica y la interacción humano-máquina.
La creación de esta mano robótica capaz de sentir y manejar objetos como si fuera un ser humano. Representa un avance interesante en el campo de la robótica y la interacción humano-máquina.
El equipo de investigadores de la Universidad de Columbia ha superado desafíos técnicos significativos. Y ha logrado enseñar a la mano robótica a manipular objetos complejos con destreza y seguridad.
Además, su extraordinario sentido del tacto la convierte en una herramienta prometedora para brindar asistencia avanzada a personas que requieren ayuda en tareas específicas. Este hito pone de manifiesto el continuo progreso hacia una nueva era. En la que la colaboración entre humanos y robots se vuelve más estrecha y efectiva.
La navegación adecuada es un aspecto importante en el funcionamiento de los robots. Ya que les permite moverse de manera eficiente y segura en su entorno. Para lograr una manipulación precisa de objetos, el equipo de investigadores de la Universidad de Columbia se enfrentó al desafío de abordar lo que se conoce como una ‘estructura espacial’.
La ‘estructura espacial’ se refiere a cómo se espera que un robot se mueva correctamente en relación con su entorno y los objetos que va a manipular. En el caso de la mano robótica desarrollada por el equipo, era esencial comprender y planificar los movimientos necesarios para interactuar con diferentes objetos de manera efectiva.
Para abordar este desafío, los investigadores emplearon un método específico que les permitió navegar con precisión. Este método involucró el uso de algoritmos de planificación y control que fueron desarrollados y adaptados específicamente para las capacidades y características de la mano robótica.
El equipo de Columbia aplicó técnicas de aprendizaje automático y algoritmos de planificación basada en muestreo (SBP). Para mejorar el control y la capacidad de manipulación de la mano robótica. Estos algoritmos les permitieron enseñarle a la mano cómo moverse y adaptarse a diferentes situaciones y objetos de manera óptima.
La combinación de técnicas de aprendizaje automático y algoritmos de planificación basada en muestreo. Permitió a la mano robótica adquirir habilidades de manipulación más avanzadas. Se le enseñó a mantener al menos tres dedos en contacto con el objeto, equilibrar la fuerza utilizada por cada dedo y ajustar su agarre en caso de resbalones o formas que requirieran diferentes cantidades de presión para mantener la seguridad del objeto.
Estos métodos permitieron a la mano robótica moverse de manera precisa y adaptarse a diferentes objetos de forma eficiente, garantizando una manipulación diestra y segura.
El desarrollo de la mano robótica con habilidades de manipulación similar a las de un ser humano no se logró únicamente mediante la programación de movimientos predefinidos.
El equipo de investigadores de la Universidad de Columbia recurrió al poder del aprendizaje automático y los algoritmos de planificación basada en muestreo (SBP) para mejorar aún más el control y la destreza de la mano robótica.
El aprendizaje automático es una rama de la inteligencia artificial que permite a las máquinas aprender y mejorar su rendimiento a través de la experiencia. En el caso de la mano robótica, los investigadores utilizaron métodos de aprendizaje automático para entrenarla en la tarea de mantener contacto con los objetos.
Para lograrlo, se recolectaron datos de entrenamiento que incluían información sobre la forma, la textura y otras características de los objetos.
Estos datos se utilizaron para entrenar al algoritmo de aprendizaje automático, que luego fue capaz de aprender a reconocer y adaptarse a diferentes objetos en función de su información táctil.
Además del aprendizaje automático, el equipo aplicó algoritmos de planificación basada en muestreo (SBP, por sus siglas en inglés) para mejorar el control de la mano robótica sobre los objetos. Estos algoritmos permiten tomar decisiones basadas en muestras o estimaciones probabilísticas, lo que brinda un mayor nivel de adaptabilidad y precisión en la manipulación de objetos.
Con la combinación de aprendizaje automático y algoritmos SBP, la mano robótica fue entrenada para mantener contacto con los objetos de manera hábil. Se le enseñó a equilibrar la fuerza utilizada por cada dedo y a ajustar su agarre en tiempo real, especialmente cuando un objeto comenzaba a resbalar o requería diferentes niveles de presión para mantener un agarre seguro.
Estos métodos permitieron mejorar el control, la adaptabilidad y la destreza de la mano, enseñándole a mantener contacto con los objetos de manera efectiva y segura.
La manipulación diestra de objetos complejos ha sido un desafío constante en el campo de la robótica. Sin embargo, el equipo de investigadores de la Universidad de Columbia ha logrado un avance significativo al desarrollar una técnica novedosa que permite asegurar objetos sin depender de superficies de soporte pasivas.
Tradicionalmente, muchos sistemas robóticos requerían de superficies adicionales, como mesas o bandejas, para mantener objetos en su lugar durante la manipulación. Sin embargo, la mano robótica desarrollada por el equipo de Columbia ha superado esta limitación.
La técnica desarrollada se basa en el uso de algoritmos de planificación y control avanzados, combinados con un aprendizaje automático preciso. Gracias a estos métodos, la mano robótica es capaz de agarrar y manipular objetos complejos sin la necesidad de contar con una superficie de soporte adicional.
Esta capacidad de manipulación sin superficies de soporte pasivas es especialmente relevante al considerar formas cóncavas u objetos difíciles de sostener. La mano robótica puede adaptar su agarre y aplicar la fuerza adecuada en diferentes puntos del objeto para garantizar su estabilidad y seguridad durante la manipulación.
El equipo de investigación ha destacado la importancia de este avance en la manipulación diestra de objetos complejos. En su estudio publicado en arXiv, señalaron que el objetivo principal es lograr la manipulación de objetos aún más desafiantes, incluyendo formas cóncavas. Sin depender de superficies de apoyo externas.
Esta técnica innovadora tiene implicaciones significativas en diversos campos, como la robótica industrial, la asistencia médica y la automatización de tareas. Al permitir a los robots manipular objetos complejos sin necesidad de soportes pasivos, se abre un amplio abanico de posibilidades para la aplicación práctica de la mano robótica en situaciones del mundo real.
Esta capacidad de manipulación diestra de objetos complejos, incluyendo formas cóncavas y objetos difíciles, representa un avance importante en el campo de la robótica y abre nuevas posibilidades en diversos ámbitos de aplicación.
La mano robótica desarrollada por el equipo de investigadores de la Universidad de Columbia destaca no solo por su destreza en la manipulación de objetos. Sino también por su asombroso sentido del tacto. Este avance tecnológico ha despertado un gran interés debido a su potencial para ser utilizado como un mecanismo de asistencia avanzado para personas que necesitan ayuda en tareas específicas.
Equipada con sensores táctiles avanzados, la mano robótica puede percibir y analizar información táctil de manera similar a como lo hace una mano humana. Puede detectar la textura, la presión y la fuerza ejercida sobre los objetos con una precisión excepcional.
Este sentido del tacto tan sofisticado abre la puerta a numerosas aplicaciones en el campo de la asistencia. Por ejemplo, personas con discapacidades físicas podrían beneficiarse enormemente de esta tecnología. Ya que la mano robótica podría ayudarles en tareas cotidianas que requieren un manejo preciso de objetos.
Imaginemos a alguien con dificultades para agarrar y sostener utensilios de cocina. La mano robótica podría intervenir como una extensión de su propia mano, proporcionando la fuerza y el agarre necesarios para manejar utensilios de manera segura y eficiente. De esta manera, se brinda una mayor autonomía y calidad de vida a las personas que enfrentan limitaciones físicas.
Además, la mano robótica podría utilizarse en entornos laborales, donde las tareas requieren una manipulación precisa y delicada. Por ejemplo, en la industria de la electrónica, donde se manejan componentes pequeños y frágiles, la mano robótica podría desempeñar un papel crucial al garantizar la seguridad y la precisión en la manipulación de estos objetos.
El potencial beneficio de esta tecnología se extiende más allá de la asistencia física. También podría utilizarse en la rehabilitación y terapia ocupacional, ayudando a las personas a recuperar la destreza y habilidades motoras en situaciones específicas. La mano robótica podría adaptarse a las necesidades individuales y proporcionar un entorno controlado para practicar y fortalecer habilidades motoras.
Su capacidad para percibir y manipular objetos con precisión y seguridad tiene el potencial de mejorar la calidad de vida de las personas con discapacidades físicas. Y de facilitar tareas en entornos laborales específicos. Esta tecnología prometedora brinda esperanza y oportunidades para un futuro más inclusivo y accesible.
En conclusión, la creación de la mano robótica con capacidad de sentir y manejar objetos como un humano representa un logro significativo en el campo de la robótica y la asistencia humana. Esta innovación tecnológica abre nuevas posibilidades y presenta múltiples aplicaciones futuras.
La capacidad de la mano robótica para manipular objetos complejos sin depender de superficies de soporte pasivas es un avance significativo. Esto tiene implicaciones tanto en la robótica industrial. Donde puede aumentar la eficiencia y precisión en la manipulación de objetos. Como en otras áreas como la asistencia médica. Donde puede ser utilizado como un mecanismo de asistencia avanzado para personas con necesidades específicas.
Además, el sentido del tacto asombroso de la mano robótica amplía aún más sus posibilidades de aplicación. Su capacidad para percibir y analizar información táctil de manera similar a una mano humana ofrece oportunidades en el campo de la asistencia. Personas con discapacidades físicas pueden beneficiarse de esta tecnología al recibir ayuda en tareas cotidianas que requieren un manejo preciso de objetos. Asimismo, su uso en entornos laborales y terapia ocupacional promete mejorar la precisión y la eficiencia en la manipulación de objetos delicados.
Esta innovación tecnológica marca un paso hacia adelante en la colaboración entre humanos y robots. Y presenta un futuro prometedor en el que la tecnología robótica desempeñará un papel cada vez más relevante en diversas áreas de la sociedad.